
Experiments with DyRET
DyRET is primarily used for experiments in evolution of walking gaits for a quadruped robot. In our experiments the gait movement is evolved simultaneously with the leg-length of the robot. We have found that in different environments, optimising both gait and leg-length is crucial to find a balance between speed and stability.
Publications
- Tønnes F. Nygaard, Charles P. Martin, Eivind Samuelsen, Jim Torresen, Kyrre Glette. Real-World Evolution Adapts Robot Morphology and Control to Hardware Limitations. In GECCO18 (ACM), 2018. arXiv:180503388
- Tønnes F. Nygaard, Charles P. Martin, Jim Torresen, Kyrre Glette. Exploring Mechanically Self-Reconfiguring Robots for Autonomous Design. In Workshop on Autonomous Robot Design at ICRA18, 2018. arXiv:1805.02965
- Tønnes F. Nygaard, Jim Torresen, Kyrre Glette. Multi-objective Evolution of Fast and Stable Gaits on a Physical Quadruped Robotic Platform. In SSCI (IEEE), 2016. DOI: 10.1109/SSCI.2016.7850167
Preprints
- Tønnes F. Nygaard, Charles P. Martin, Jim Tørresen, Kyrre Glette. Self-Modifying Morphology Experiments with DyRET: Dynamic Robot for Embodied Testing. arXiv:180305629
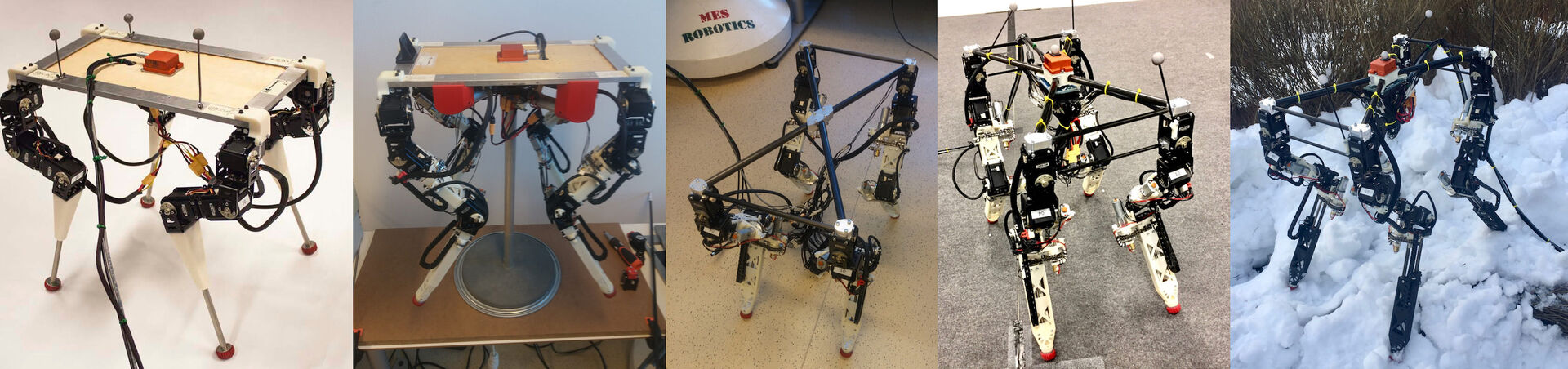
Design Iterations
Press
- New Evolving Robot Teaches Itself to Walk Through Trial and Error - Interesting Engineering, May 2018.
- The Shape-Shifting Robot that Evolves by Falling Down - WIRED, May 2018.
- Robotane må tilpasse seg oss menneske - Framtida, January 2017.
- Nå kommer robotene som lagrer som et menneske - Titan, October 2016.